- 您现在的位置:买卖IC网 > Sheet目录342 > MCZ33937EKR2 (Freescale Semiconductor)IC PRE-DRIVER 3PHASE 54-SOIC
�� �
�
�FUNCTIONAL� DEVICE� OPERATION�
�LOGIC� COMMANDS� AND� REGISTERS�
�STATUS� REGISTERS�
�After� any� SPI� command,� the� status� of� the� IC� is� reported� in�
�the� return� value� from� the� SPI� port.� There� are� four� variants� of�
�the� NULL� command� used� to� read� various� status� in� the� IC.�
�Other� commands� return� a� general� status� word� in� the� Status�
�Register� 0.�
�There� are� four� Status� Registers� in� the� IC.� Status�
�Register� 0� is� most� commonly� used� for� general� status.�
�Registers� one� through� three� are� used� to� read� or� confirm�
�internal� IC� settings.�
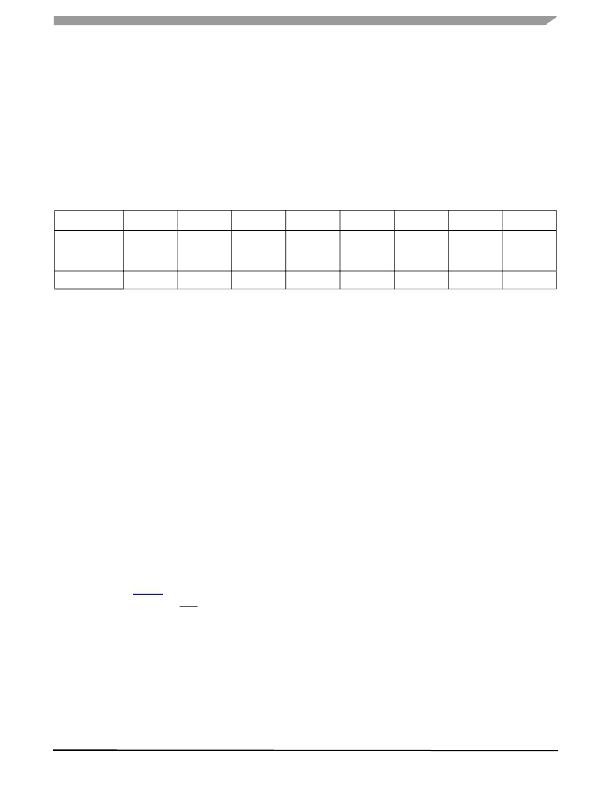
�Status� Register� 0� (Status� Latch� Bits)�
�This� register� is� read� by� sending� the� NULL0� command� (000x� xx00).� It� is� also� returned� after� any� other� command.� This� command�
�returns� the� following� data:�
�Table� 14.� Status� Register� 0�
�SPI� Data� Bits�
�Results�
�Register� 0�
�Read�
�Reset�
�7�
�RESET�
�Event�
�1�
�6�
�Write�
�Error�
�0�
�5�
�Framing�
�Error�
�0�
�4�
�Phase�
�Error�
�0�
�3�
�Over-current�
�0�
�2�
�Low�
�VLS�
�0�
�1�
�DESAT�
�Detected� on�
�any� Channel�
�0�
�0�
�TLIM�
�Detected� on�
�any� Channel�
�0�
�All� status� bits� are� latched.� The� latches� are� cleared� only� by� sending� a� CLINT0� or� CLINT1� command� with� the� appropriate� bits�
�set.� If� the� status� is� still� present,� that� bit� will� not� clear.� CLINT0� and� CLINT1� have� the� same� format� as� MASK0� and� MASK1�
�respectively.�
�?� Bit� 0� –is� a� flag� for� Over-temperature� on� any� channel.� This� bit� is� the� OR� of� the� latched� three� internal� TLIM� detectors.This�
�flag� can� generate� an� interrupt� if� the� appropriate� mask� bit� is� set.�
�?� Bit� 1� –is� a� flag� for� Desaturation� Detection� on� any� channel.� This� bit� is� the� OR� of� the� latched� three� internal� High� Side�
�desaturation� detectors� and� phase� error� logic.� Faults� are� also� detected� on� the� Low� Side� as� phase� errors.� A� phase� error� is�
�generated� if� the� output� signal� (at� Px_HS_S)� does� not� properly� reflect� the� drive� conditions.� The� phase� error� is� the� triple� OR�
�of� phase� errors� from� each� phase.� Each� phase� error� is� the� OR� of� the� HS� and� LS� phase� errors.� An� HS� phase� error� (which�
�will� also� trigger� the� desaturation� detector)� occurs� when� the� HS� FET� is� commanded� on,� and� the� Px_HS_S� is� still� low� in� the�
�deadtime� duration� after� it� is� driven� ON.� Similarly,� a� LS� phase� error� occurs� when� the� LS� FET� is� commanded� on,� and� the�
�Px_HS_S� is� still� high� in� the� deadtime� duration� after� the� FET� is� driven� ON.� This� flag� can� generate� an� interrupt� if� the�
�appropriate� mask� bit� is� set.�
�?� Bit� 2� –� is� a� flag� for� Low� Supply� Voltage� .� This� flag� can� generate� an� interrupt� if� the� appropriate� mask� bit� is� set.�
�?� Bit� 3� –is� a� flag� for� the� output� of� the� Over-current� Comparator� .� This� flag� can� generate� an� interrupt� if� the� appropriate� mask�
�bit� is� set.�
�?� Bit� 4� –is� a� flag� for� a� Phase� Error� .� If� any� Phase� comparator� output� is� not� at� the� expected� value� when� just� one� of� the�
�individual� high� or� Low� Side� outputs� is� enabled,� the� fault� flag� is� set.� This� signal� is� the� XOR� of� the� phase� comparator� output�
�with� the� output� driver� state,� and� blanked� for� the� duration� of� the� desaturation� blanking� interval.� This� flag� can� generate� an�
�interrupt� if� the� appropriate� mask� bit� is� set.�
�?� Bit� 5� –is� a� flag� for� a� Framing� Error� .� A� framing� error� is� a� SPI� message� not� containing� one� or� more� multiples� of� eight� bits.�
�SCLK� toggling� while� measuring� the� Deadtime� calibration� pulse� is� also� a� framing� error.� This� would� typically� be� a� transient�
�or� permanent� hardware� error,� perhaps� due� to� noise� on� the� SPI� lines.� This� flag� can� generate� an� interrupt� if� the� appropriate�
�mask� bit� is� set.�
�?� Bit� 6� –indicates� a� Write� Error� After� the� Lock� bit� is� set.� A� write� error� is� any� attempted� write� to� the� MASKn,� Mode,� or� a�
�Deadtime� command� after� the� Mode� Lock� bit� is� set.� A� write� error� is� any� attempt� to� write� any� other� command� than� the� one�
�defined� in� the� Table 7� .� This� would� typically� be� a� software� error.� This� flag� can� generate� an� interrupt� if� the� appropriate� mask�
�bit� is� set.�
�?� Bit� 7� –is� set� upon� exiting� RST� .� It� can� be� used� to� test� the� interrupt� mechanism� or� to� flag� for� a� condition� where� the� IC� gets�
�reset� without� the� host� being� otherwise� aware.� This� flag� can� generate� an� interrupt� if� the� appropriate� mask� bit� is� set.�
�33937A�
�Analog� Integrated� Circuit� Device� Data�
�Freescale� Semiconductor�
�35�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
MDN2BL3GRAS
MOTOR BRUSHED DC 2V 2753RPM
MDN3BL3CSAS
MOTOR BRUSHED DC 2V 1458RPM
MIC2287-34YML TR
IC LED DRIVER WHITE BCKLGT 8-MLF
MIC2289C-34YD6 TR
IC LED DRIVR WHITE BCKLGT TSOT-6
MIC2291YD5 TR
IC LED DRIVER PHOTO FLASH TSOT-5
MIC2293-15YML TR
IC LED DRIVER WHITE BCKLGT 8-MLF
MIC2293C-34YML TR
IC LED DRIVER WHITE BCKLGT 8-MLF
MIC2297-42YML TR
IC LED DRIVR WHITE BCKLGT 10-MLF
相关代理商/技术参数
MCZ33970EG
功能描述:马达/运动/点火控制器和驱动器 DUAL GAGE DRVR IMP DAMP RoHS:否 制造商:STMicroelectronics 产品:Stepper Motor Controllers / Drivers 类型:2 Phase Stepper Motor Driver 工作电源电压:8 V to 45 V 电源电流:0.5 mA 工作温度:- 25 C to + 125 C 安装风格:SMD/SMT 封装 / 箱体:HTSSOP-28 封装:Tube
MCZ33970EG
制造商:Freescale Semiconductor 功能描述:IC STEPPER MOTOR GAUGE DRIVER SPI
MCZ33970EGR2
功能描述:马达/运动/点火控制器和驱动器 DUAL GAGE DRVR IMP DAMP RoHS:否 制造商:STMicroelectronics 产品:Stepper Motor Controllers / Drivers 类型:2 Phase Stepper Motor Driver 工作电源电压:8 V to 45 V 电源电流:0.5 mA 工作温度:- 25 C to + 125 C 安装风格:SMD/SMT 封装 / 箱体:HTSSOP-28 封装:Tube
MCZ33972AEK
功能描述:接口 - 专用 MULT SW DET SUP-WKUP RoHS:否 制造商:Texas Instruments 产品类型:1080p60 Image Sensor Receiver 工作电源电压:1.8 V 电源电流:89 mA 最大功率耗散: 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:BGA-59
MCZ33972AEK/R2
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Multiple Switch Detection Interface with Suppressed Wake-up
MCZ33972AEKR2
功能描述:接口 - 专用 MULT SW DET SUP-WKUP RoHS:否 制造商:Texas Instruments 产品类型:1080p60 Image Sensor Receiver 工作电源电压:1.8 V 电源电流:89 mA 最大功率耗散: 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:BGA-59
MCZ33972AEW
功能描述:接口 - 专用 MULT SW DET SUPRESS WU RoHS:否 制造商:Texas Instruments 产品类型:1080p60 Image Sensor Receiver 工作电源电压:1.8 V 电源电流:89 mA 最大功率耗散: 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:BGA-59
MCZ33972AEW/R2
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Multiple Switch Detection Interface with Suppressed Wake-up